
During this project we made a small robot that uses sensors, motors, and by driving back and forth between two walls and moving a pen it is able to draw a parabolic line.
Overview
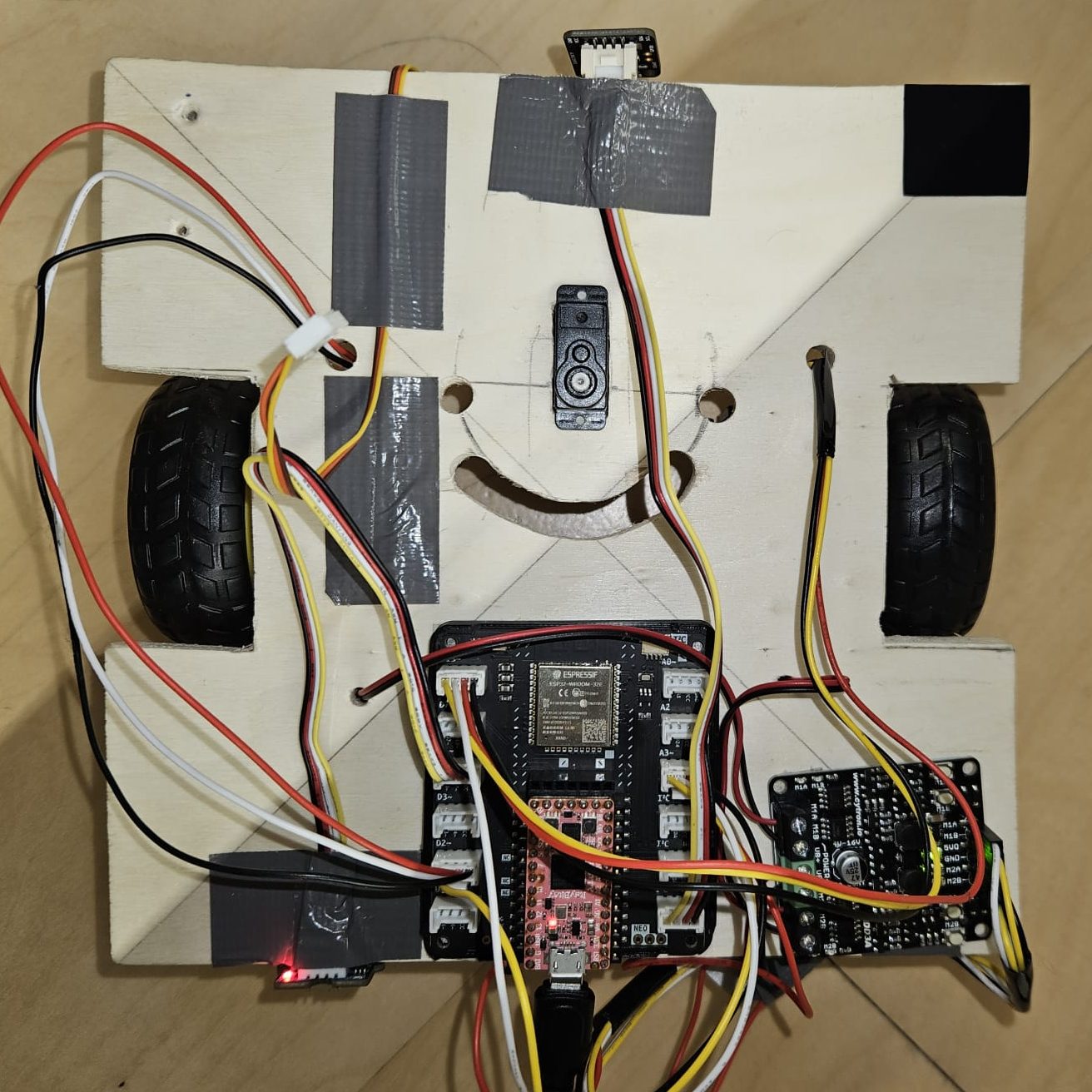
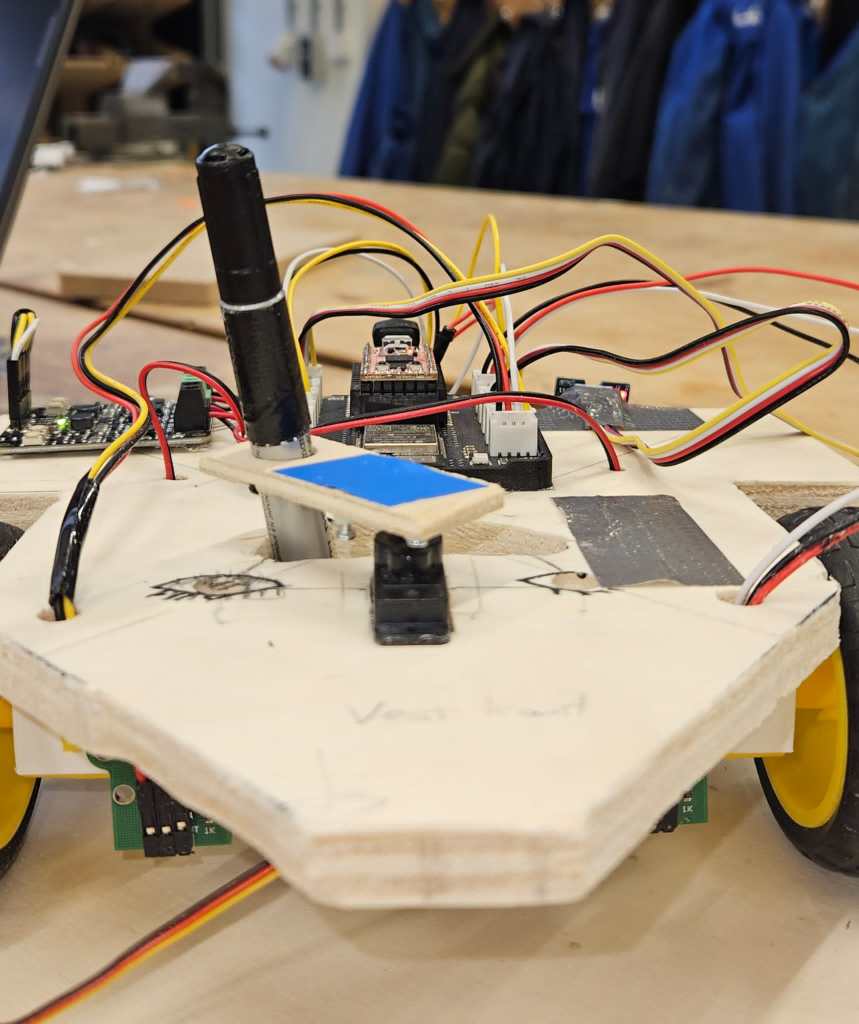
This project was all about designing, building, and programming a small robot to perform a precise task. Through several iterations, we refined the robot’s structure, motor setup, and pen mechanism. A distance sensor triggered each turn, and careful coding to ensure the robot completes the desired sequence of alternating turns in both directions correctly and then stops on the correct spot.
My Role
Motors, Pen Mechanism and Sensor Setup / Wiring
Arduino Programming for Movement and Sequence
Testing and Calibration of Robot Behavior
Time
3 Months
3 Primary Problems
1. Navigation
Getting the robot to detect walls accurately and alternate its turning direction.
2. Timing
Syncing the movement sequence to ensure five turns and a clean stop.
3. Aligning
Tuning the robot to drive in a straight line, which proved surprisingly tricky.
Opportunity
This project explores how simple robotics can turn programmed behavior into visual expression, offering a playful and hands-on way to learn the fundamentals of building and controlling robots.
Iterations
Final Concept
The final concept is a small robot that uses sensors and motors to move back and forth between two walls while manipulating a pen to draw parabolic lines.
Reflection
All though this project did not involve the creation of anything that hasn’t been done before or a creative solution to a problem. It did provide an engaging, hands-on approach to learning mechatronic fundamentals such as assembly, motor control, sensor feedback, PID control, microcontroller programming.
